Some old news.
Taking Flight (Caltech, 1/27/2017)
Drones Take Wing (Inside Unmanned Systems, 2/2016)
Robotic Falcon Could Keep Birds Away from Airplanes (Inside Unmanned Systems, 2/2016)
UIUC Is Working With John Deere on Robotic Lawn Mowing Technology (Chicago Inno, 7/15/2015)
This robot bat drone is the stuff of nightmares (Quartz, 6/3/2015)
Robot Designers Take Cues from Nature (Cadalyst Magazine, 11/20/2014)
Chung Honored with Dean’s Award for Excellence in Research Chung named Center for Advanced Study (CAS) Beckman Fellow (AE UIUC, 1/2014)
Video shows progress of swarm spacecraft research (AE UIUC , 1/2014)
UI hosts technology showcase (News Gazette, 10/11/2013)
Engineers have a thing with feathers (Chicago Crain's Business, 5/28/2012)
Flapping Robotic Birdplane Lands Right on Your Hand (IEEE Spectrum, 5/2/2012)
Mimicking Mother Nature: Scientists create a fixed-wing flying robot that can slow down and land like a bird (UK Daily Mail, 5/2/2012)
Research Focus: Control and Robotics for Complex Aerospace Systems
All of our past and current research projects share a single common research theme: nonlinear control, estimation, and synchronization of multi-agent or distributed dynamical systems. Such tools are used to reduce the complexity of networked dynamic systems that span swarms of spacecraft, coupled neural oscillators for flapping wing patterns, and vision-based sensing for autonomous navigation. Balance between theoretical excellence and practice: I aim to develop physically intuitive algorithms and novel design ideas that can easily be implemented in real-world systems, evidenced by my experimental research program.
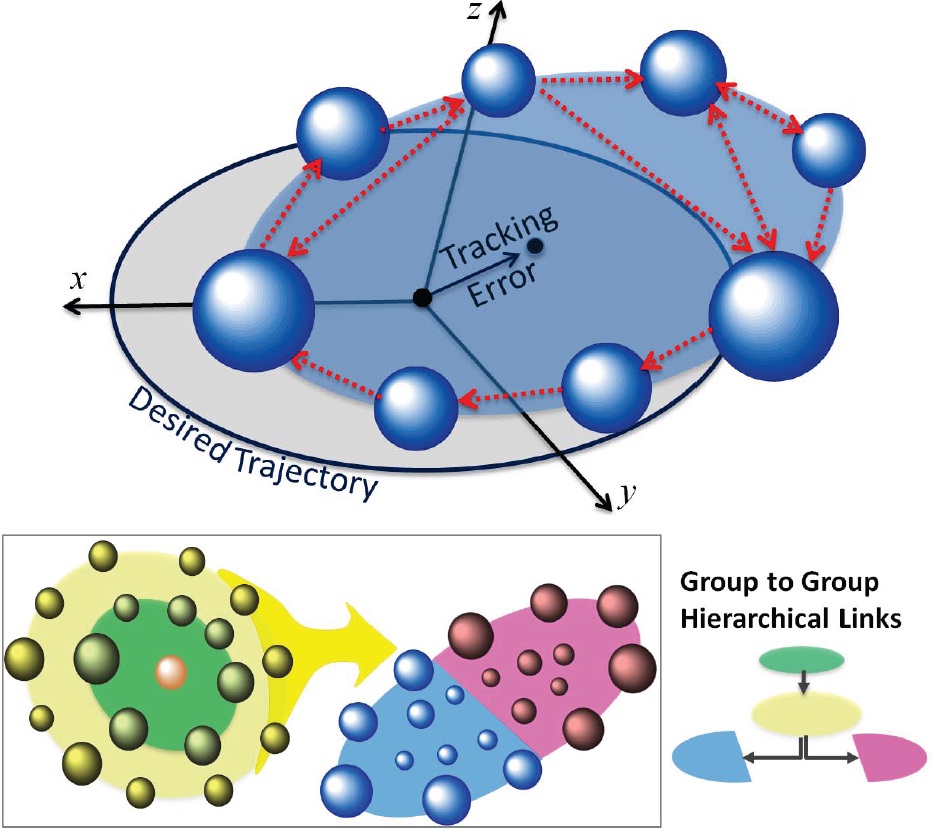
Swarm Robotics: Cooperative Control and Synchronization of Multi-Agent Robotic Systems, Oscillators, and Central Pattern Generators (CPG) Automatica Paper; T-RO Paper
Distributed Spacecraft Technology, Spacecraft Swarms, Formation Flying Spacecraft, Optimal Motion Planning of Spacecraft Swarms (Sequential Convex Programming & Probabilistic Swarm Guidance Algorithms), Novel Space Systems, jointly with NASA JPL (Homepage)
Flight Control, Dynamics, and Motion Planning for Micro Aerial Vehicles. Flapping Flight Controls (AIAA Best Paper Award). Fly like a Bird.Bioinsp. Biomim. Lab Talk; Control of Flexible Aircraft (PDE Boundary Control of Flexible Wings).Guidance and Control of Autonomous Perching Aircraft (T-RO paper) (See media coverage on this research)
Nonlinear Control and Estimation Theory. IEEE T-AC paper on the new nonlinear filtering algorithm
Vision Based Navigation and SLAM with Aerospace Vehicles
Current and Past External Grants
Fast Optimal Motion Planning with High Fidelity Dynamics NASA JPL R&TD Phase 1 & Phase 2
In-Orbit Additive Construction Using Modular Swarms of Spacecraft NASA
NASA Space Technology Research Fellowship (Rebecca Foust) PI: S.-J. ChungNovel Methodology for Control and Stabilization of Spacecraft with Captured Asteroid NASA Center Innovation Fund (CIF) Phase 1 & Phase 2
Strain Actuated Solar Array for SC Attitude & Instrument Jitter Control NASA JPL R&TD (jointly with James Allison) PI: O. Alvarez-Salazar (JPL)
NRI/Collaborative Research: Improving the Safety and Agility of Robotic Flight with Bat-Inspired Flexible-Winged RobotsNational Science Foundation (NSF) PI: S. Hutchinson, Co-PI: S.-J. Chung, Brown PI: K. Breuer, Co-PI: S. Swartz
Vision-Centric Multi-Sensor Fusion for Navigation in Riverine Environments Office of Naval Research (ONR) PI: S.-J. Chung, Co-PI: S. Hutchinson
System Engineering Study of CubeSat Formation Flying NASA/Caltech Jet Propulsion Laboratory (JPL) PI: Soon-Jo Chung
CAREER: Control and Sensing Strategies for Robotic Falcons to Prevent Airport Bird Strikes
National Science Foundation (NSF) PI: S.-J. ChungMinimal Representation and Decision Making for Networked Autonomous Agents P. Voulgaris (PI) and 4 Co-PIs: S.-J. Chung, S. Hutchinson, S. LaValle, and M. Egerstedt Air Force Office of Scientific Research (AFOSR) Program manager: Dr. Fariba Fahroo Project Website
Bio-Inspired Flexible Cellular Actuating Systems. Army Research Office (ARO) Program manager: Dr. Sam Stanton PI: S.-J. Chung, co-PI: A. Bastawros (Iowa State)
Vision Based Navigation in Riverine Environments. Office of Naval Research (ONR) Program managers: Drs. David Han and Marc Steinberg PI: S.-J. Chung, Co-PI: S. Hutchinson
Dynamics and Controls of Swarms of Femtosatellites. NASA Office Chief Technologist/ Early Stage Innovation Division NASA Space Technology Research Fellowship PI: S.-J. Chung with Daniel Morgan
Vision Containment for Robotic Mowing. John Deere (JDTIC) PI: S. Hutchinson, Co-PI: S.-J. Chung
Testbed Demonstration of Swarms of Femtosats NASA/Caltech Jet Propulsion Laboratory (JPL), JPL Director's Research and Development Fund PI: F. Y. Hadaegh (JPL), Co-PI: S.-J. Chung
Bio-inspired Integrated Sensing and Control of Flapping Flight for Micro Aerial Vehicles. Air Force Office of Scientific Research (AFOSR) Program manager: Dr. Willard Larkin PI: S.-J. Chung 2009-2011,
UAS Vision-Tracking Challenge, (2012-2014) Rockwell Collins
Educational Grant: Lunarobotics Competition for the Illinois Robotics in Space (IRIS), NASA ESMD (2011)
Research Topics
Spacecraft Swarms and Guidance, Navigation, and Controls for Novel Space Systems
Jointly with Dr. Fred Y. Hadaegh at NASA's Jet Propulsion Laboroatory (JPL Distributed Spacecraft Technology), we develop novel guidance, control, and navigation algorithms for distributed spacecraft systems.



The Spacecraft Swarm Project presents a new paradigm-shifting definition of spacecraft technology that can enable flight of swarms of fully capable femtosats, which can supersede conventional monolithic space systems. In this work, "swarm" refers to a collection of hundreds to thousands of spacecraft, while "femtosat" implies a 100-gram class spacecraft. Each femtosat can be actively controlled in all six degrees of freedom (6DOF) such that a desirable synergetic behavior emerges from the interactions among spacecraft and between the spacecraft and the environment. The femtosat swarm will push the frontier of the existing formation flying spacecraft concepts by one or two orders of magnitude in two major technological drivers: the enormous number (1000 or more) of spacecraft, compared with the previous 2-10 spacecraft formation concepts; and a tiny size and "miniaturized" capability of 100-gram femtosats. As a result, the feasibility of Spacecraft Swarms is predicated on two enabling technological developments: (1) fabrication of 100-gram femtosats and (2) the individual and synergetic guidance, navigation, and control (GN&C) capabilities of femtosats. The synergetic GN&C capabilities of the swarm permit coordinated maneuvers of femtosats so that the swarm can collectively exhibit or exceed a capability of much more complicated monolithic space systems.

For further reading:
F. Y. Hadaegh, S.-J. Chung, and H. M. Manohara, “On Development of 100-Gram-Class Spacecraft for Swarm Applications” IEEE Systems Journal, 2016. (PDF)
J. Yu, S.-J. Chung, and P. G. Voulgaris, “Target Assignment in Robotic Networks: Distance Optimality Guarantees and Hierarchical Strategies,” IEEE Transactions on Automatic Control, vol. 60, no. 2, February 2015, pp. 327-341. (PDF)
D. Morgan, S.-J. Chung, and F. Y. Hadaegh, “Model Predictive Control of Swarms of Spacecraft Using Sequential Convex Programming,” Journal of Guidance, Control, and Dynamics, in press, 2014. (PDF)
S. Bandyopadhyay, S.-J. Chung, and F. Y. Hadaegh, “Inhomogeneous Markov Chain Approach to Probabilistic Swarm Guidance Algorithm,” 5th Int. Conf. on Spacecraft Formation Flying Missions and Technologies (SFFMT), Munich, Germany, May 2013.
D. Morgan, S.-J. Chung, and F. Y. Hadaegh, “Decentralized Model Predictive Control of Swarms of Spacecraft Using Sequential Convex Programming,” Proc. 23rd AAS/AIAA Space Flight Mechanics Meeting, Kauai, Hawaii, February 10-14, 2013. (PDF)
D. Morgan, S.-J. Chung, L. Blackmore, B. Acikmese, D. Bayard, and F. Y. Hadaegh, "Swarm-Keeping Strategies for Spacecraft under J2 and Atmospheric Drag Perturbations,"Journal of Guidance, Control, and Dynamics, vol. 35, no. 5, September-October 2012, pp. 1492-1506. (PDF)
S.-J. Chung, S. Bandyopadhyay, I. Chang, and F. Y. Hadaegh, "Phase Synchronization Control of Complex Networks of Lagrangian Systems on Adaptive Digraphs," Automatica, vol. 49, no. 5, May 2013, pp. 1148-1161. (PDF)
D. Morgan, S.-J. Chung, and F. Y. Hadaegh, “Decentralized Model Predictive Control of Swarms of Spacecraft Using Sequential Convex Programming,” Proc. 23rd AAS/AIAA Space Flight Mechanics Meeting, Kauai, Hawaii, February 10-14, 2013. (PDF)
D. Morgan, S.-J. Chung, and F. Y. Hadaegh, "Spacecraft Swarm Guidance Using a Sequence of Decentralized Convex Optimizations," AIAA/AAS Astrodynamics Specialist Conference, Minneapolis, MN, August, 2012, AIAA-2012-4583. (PDF)
S.-J. Chung and F. Y. Hadaegh, "Swarms of Femtosats for Synthetic Aperture Applications,"4th International Conference on Spacecraft Formation Flying Missions and Technologies (SFFMT), St-Hubert, Quebec, May 18-20, 2011. (PDF)
S.-J. Chung, and J.-J. E. Slotine, "Cooperative Robot Control and Concurrent Synchronization of Lagrangian Systems," IEEE Transactions on Robotics, vol. 25, no. 3, pp. 686-700, June 2009. (PDF)
S.-J. Chung, U. Ahsun, and J.-J. E. Slotine, "Application of Synchronization to Formation Flying Spacecraft: Lagrangian Approach," Journal of Guidance, Control, and Dynamics, vol. 32, no. 2, Mar.-Apr. 2009, pp. 512-526. (PDF)
Nonlinear Control Theory, Synchronization, and Distributed Estimation of Multi-Agent Systems

For further reading:
J. Yu, S.-J. Chung, and P. G. Voulgaris, “Target Assignment in Robotic Networks: Distance Optimality Guarantees and Hierarchical Strategies,” IEEE Transactions on Automatic Control, vol. 60, no. 2, February 2015, pp. 327-341. (PDF)
S.-J. Chung, S. Bandyopadhyay, I. Chang, and F. Y. Hadaegh, "Phase Synchronization Control of Complex Networks of Lagrangian Systems on Adaptive Digraphs," Automatica, vol. 49, no. 5, May 2013, pp. 1148-1161. (PDF)
S.-J. Chung, and J.-J. E. Slotine, "Cooperative Robot Control and Concurrent Synchronization of Lagrangian Systems," IEEE Transactions on Robotics, vol. 25, no. 3, pp. 686-700, June 2009. (PDF)
S.-J. Chung and J.-J. E. Slotine, "On Synchronization of Coupled Hopf-Kuramoto Oscillators with Phase Delays,"invited paper, IEEE Conference on Decision and Control (CDC), Atlanta, GA, Dec. 2010, pp. 3181 - 3187.

NSF CAREER: Control and Sensing Strategies for Robotic Falcons to Prevent Airport Bird Strikes
The intellectual merit of this proposal lies in the bio-inspired approaches to novel control strategies, vision-based sensing solutions, and strategies for cooperative pursuit and herding that will be gleaned from the literature and observations of the behavior of birds. This study will result in both fundamental scientific knowledge and a practical application revolving around the development of highly maneuverable unmanned aerial vehicles based on flapping-wing robots. The intelligence of birds manifests itself in the evasive talents of flocks of birds and this proposal attempts to recreate that intelligence through the challenge of applying a bird-like robot to the problem of preventing aircraft/bird collisions near airports. According to surveys by the International Bird Strike Committee, none of the existing systems to prevent bird strikes on airfields are adequate. The reasons include habituation by birds to these systems; movement of birds to other parts of the area, or scattering of them all over the airfield; and the tendency of birds to come back when a threat has gone. The only proven lasting way of removing birds is by using live birds of prey, but real birds are too difficult to control and train. An alternative is to study and extract the behaviors and dynamics of real birds in order to develop and deploy a robotic lookalike. The objective of this proposal, motivated by the problem of keeping airfields clear of disruptive avian flocks, is to develop control and sensing strategies for bird-like flapping robots that can be deployed in swarms to fend off "antagonists." This work will build upon the PI's previous work on the control of flapping-wing aircraft using limit-cycle-based central pattern generators (CPGs), and on the dynamics and control of flexible, articulated-wing aircraft.
Broader Impacts: Society as a whole stands to benefit immensely from robotic birds that can effectively prevent bird strikes, which cause airplane crashes and millions of dollars annually in damage. Furthermore, because of their high aerodynamic efficiency in forward flight, articulated-winged flapping aerial robots equipped with sensors could have tremendous value by being able to inspect hazardous areas. For the field of robotics, the proposed transformative research will make far-reaching contributions, advancing the state of the art in aerial robotics, cooperative control theory, and control of flexible robot structures. Additionally, this project's education and outreach activities will help introduce a new generation of young people, including those from underrepresented populations, to the excitement of science and engineering careers. Multiple avenues of educational outreach will be pursued, taking advantage of the powerful appeal of the topics of robotics and bio-inspired flight.
Aerial Robotics: Engineered Flapping Flight and Agile Micro Aerial Vehicles
Nonlinear Flight Dynamics, Stability Analysis, Flight Controls, and Experimentation PDE Boundary Control of Flexible Aircraft
For further reading:
J. Yang, A. Dani, S.-J. Chung, and S. Hutchinson, “Vision-Based Localization and Robot-Centric Mapping in Riverine Environments,” Journal of Field Robotics, to appear, 2015. (PDF)
A. A. Paranjape, K. C. Meier, X. Shi, S.-J. Chung, and S. Hutchinson, “Motion Primitives and 3D Path Planning for Fast Flight through a Forest,” The International Journal of Robotics Research, vol. 34, no. 3, March 2015, pp. 357-377 (PDF)Supplementary Video
A. Paranjape, S.-J. Chung, and J. Kim, “Novel Dihedral-Based Control of Flapping-Wing Aircraft with Application to Perching,” IEEE Transactions on Robotics, vol. 29, no. 5, October 2013, pp. 1071-1084. (PDF)Supplementary Video
A. Paranjape, J. Guan, S.-J. Chung, and M. Krstic, "PDE Boundary Control for Flexible Articulated Wings on a Robotic Aircraft," IEEE Transactions on Robotics, vol. 29, no. 3, June 2013, pp. 625-640. (PDF)
A. A. Paranjape, S.-J. Chung, H. H. Hilton, and A. Chakravarthy, "Dynamics and Performance of a Tailless MAV with Flexible Articulated Wings," AIAA Journal, vol. 50, no. 5, May 2012, pp. 1177-1188. (PDF)
A. A. Paranjape, S.-J. Chung, and M. S. Selig, "Flight Mechanics of a Tailless Articulated Wing Aircraft," Bioinspiration & Biomimetics, vol. 6, 026005, 2011, (20 pp). (PDF)
S.-J. Chung and M. Dorothy, "Neurobiologically Inspired Control of Engineered Flapping Flight,"Journal of Guidance, Control, and Dynamics, vol. 33, no. 2, Mar.-Apr. 2010, pp. 440-453. AIAA Infotech Best Paper Award(PDF)
M. Dorothy, A. A. Paranjape, P. D. Kuang, and S.-J. Chung, "Towards Bio-Inspired Robotic Aircraft: Control Experiments on Flapping and Gliding Flight," J. Valasek (Ed.), Intelligent and Autonomous Aerospace Systems, AIAA Progress in Aeronautics and Astronautics Series, American Institute of Aeronautics and Astronautics (AIAA), Reston, VA, 2012. (PDF)
Bio-inspired Tail-less Agile MAV with Articulated Wings and Robotic Perching FlightCentral Pattern Generator (CPG) Based Control for Engineered Flapping FlightLimit-Cycle Based Flapping Flight Controls (See media coverage on this research)
[embed]https://www.youtube.com/watch?v=2C6nucOF57k[/embed]

http://www.youtube.com/watch?v=DMJ2kpiUno0
Estimation Theory for Visual Navigation and Tracking, Vision-Based Simultaneous Localization and Mapping (SLAM), and Vision-Based Flight Guidance and Control
Joint with Prof. Seth Hutchinson
The foreseeable future of intelligence, surveillance, and reconnaissance (ISR) missions in riverine environments will involve natural complex environments where blackouts and multi-path errors of the Global Positioning System (GPS) and radio frequency communications are unavoidable due to occlusion by foliage and forest canopy. The ISR missions in the presence of heavy vegetation or overhanging canopies cannot be accomplished by conventional manned and unmanned air systems (UASs). Our research objective is to develop innovative small UAS systems capable of flying in complex riverine areas by utilizing vision based navigation and path planning algorithms as well as an optimal guidance and control strategy. In order to enable GPS-free navigation, the proposed strategy exploits the environmental and high-energy features of the environment, represented via corner-like feature points, multiple segments, and segmentation curves obtained by computationally efficient computer vision algorithms. Our hybrid vision algorithm integrates the mono-vision based probabilistic feature detection, correlation, and mapping algorithm with stereopsis and laser range finders. This hybrid vision method significantly differs from augmenting stereo vision with monocular cues in that computationally more efficient mono-vision methods takes precedence over stereopsis in depth perception while opportunistically integrated with depth information from lidars. The unique capabilities of the PIs, which span visual servo control and motion planning, vision-based navigation and simultaneous localization and mapping (SLAM), guidance and control of agile aerial vehicles, and nonlinear control theory and multi-agent systems, provide the expertise and synergism to realize vision-based UAS flying in complex riverine environments. We will conduct experimental validation with (1) UIUC's indoor multi-vehicle control facility equipped with a miniature riverine model and a Vicon motion tracking system and (2) actual deployment of UASs in a realistic riverine environment by leveraging autonomous UAS testbeds developed at UIUC.

SONY DSC

Picture2
For further reading:
J. Yang, A. Dani, S.-J. Chung, and S. Hutchinson, “Vision-Based Localization and Robot-Centric Mapping in Riverine Environments,” Journal of Field Robotics, to appear, 2015. (PDF)
A. P. Dani, S.-J. Chung, and S. Hutchinson, “Observer Design for Stochastic Nonlinear Systems via Contraction-based Incremental Stability,” IEEE Transactions on Automatic Control, vol. 60, no. 3, March 2015, pp. 700-714. (PDF)
A. Dani, G. Panahandeh, S.-J. Chung, and S. Hutchinson, “Image Moments for Higher-Level Feature Based Navigation,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, November 3-7, 2013, pp. 602-609. (PDF)
A. A. Paranjape, K. C. Meier, X. Shi, S.-J. Chung, and S. Hutchinson, “Motion Primitives and 3-D Path Planning for Fast Flight through a Forest,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, November 3-7, 2013, pp. 2940-2947. (PDF)(Youtube VIDEO)
J. Yang, S.-J. Chung, S. Hutchinson, D. Johnson, and M. Kise, “Vision-Based Localization and Mapping for an Autonomous Mower,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, November 3-7, 2013, pp. 3655-3662. (PDF)
A. P. Dani, S.-J. Chung, and S. Hutchinson, “Observer Design for Stochastic Nonlinear Systems using Contraction Analysis,” Proc. IEEE Conference on Decision and Control (CDC), Maui, HI, December 2012, pp. 6028-6035. (PDF)
D. Rao, S.-J. Chung, and S. Hutchinson, “CurveSLAM: An Approach for Vision-based Navigation without Point Features,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Algarve, Portugal, October 7-12, 2012. (PDF)
J. Yang, D. Rao, S.-J. Chung, and S. Hutchinson, “Monocular Vision based Navigation in GPS Denied Riverine Environments,” AIAA Infotech@Aerospace Conference, St. Louis, MO, Mar. 2011, AIAA 2011-1403. (PDF)
K. Celik, S.-J. Chung, M. Clausman, and A. K. Somani, “Monocular Vision SLAM for Indoor Aerial Vehicles,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), St. Louis, MO, Oct. 2009, pp. 1566-1573. (PDF)